在完成上一个以简单电学电路为基础的避障机器人项目后,我们将进行第三个PVC机器人项目制作。这是一个比较特殊的机器人,首先其控制电路比上一个项目稍微复杂了一点,是以电子元器件组成的;其次这个机器人不再以传统电池作为电源,而是采用了绿色环保的太阳能作为能源;另外,这个项目的动力驱动方式比较特别——以震动的方式进行挪动位移。
本项目主要面向对电子电路有点陌生的初学者,能够让大家初步掌握以电子元器件为基础的电子制作,了解基础的电子知识,理解简单的电路原理,同时掌握基本的电路焊接技巧。如果是对此已经非常熟悉的朋友,可以跳过本章节。
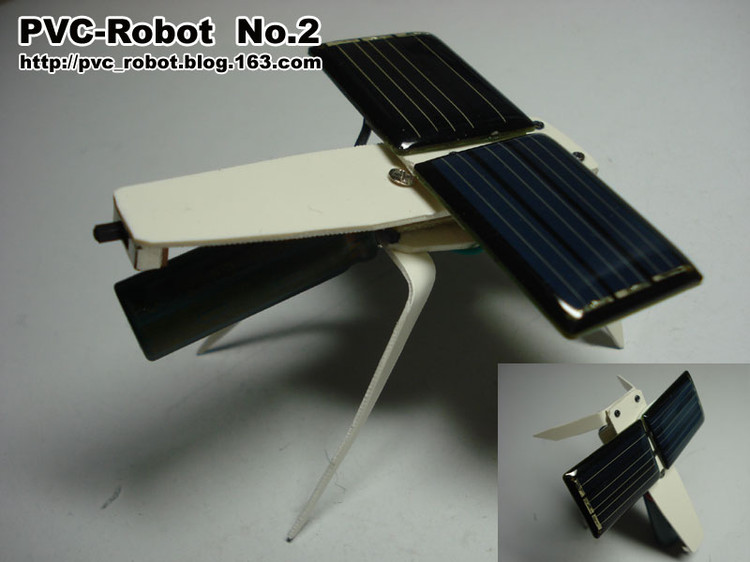
这是一个的以太阳能为能源的特殊移动机器人,即以太阳能电池为电源,以偏心摆锤马达的震动效果作为挪动的动力。
以下为效果视频,前一段是在灯光(白炽灯)下进行测试的效果,后面一段为在阳光下的效果。
因为体型相象,以及震动时的嗡嗡声,我给本项目的太阳能动力机器人再起一个外号——晒太阳的蚊子,呵呵。
本项目套件的淘宝地址:http://item.taobao.com/item.htm?id=9284864243
一、基本原理
1.1、驱动原理
1.2、机械结构
1.3、电路原理
1.3.1、电路符号
1.3.2、电子元件 (电阻、电容、二极管、三级管、震动马达、太阳能电池)
1.3.3、原理分析(常规分析、类比分析)
二、准备工作
三、制作过程
3.1、电路焊接
3.2、电路测试
3.3、结构制作
3.4、安装电路板
3.5、震动马达
3.6、太阳能电池
3.7、电源开关
3.8、整机组装
3.9、整机效果
3.10、结构完善
四、效果展示
五、常见问题
六、项目总结
一、基本原理
本项目的太阳能机器人采用太阳能电池作为电源,依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理
本项目机器人的动力来自于震动马达,这和我们的0号机器人的驱动原理是一样的,具体可以参见这里:PVCRobot 0号机器人驱动原理
这里所谓震动马达,其实就是我们手机中实现震机的震动器,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。

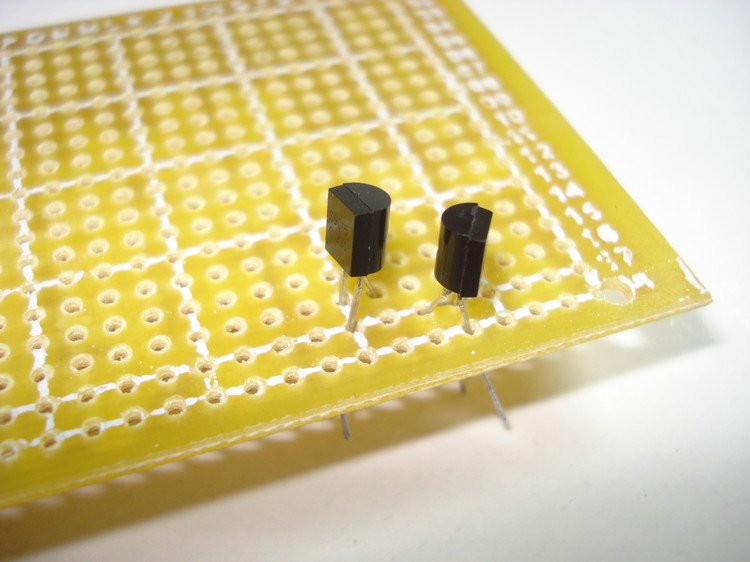
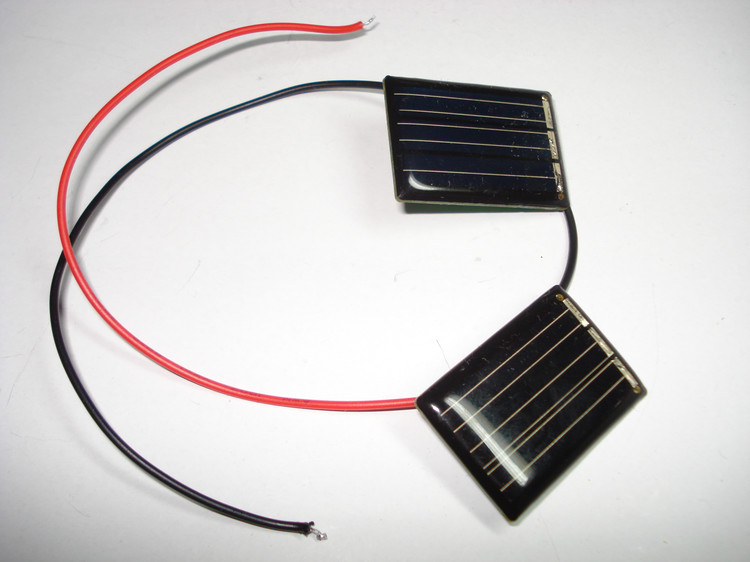
下图中左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。

2、机械结构
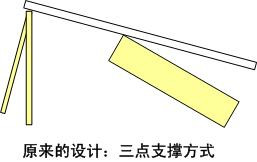
本项目机器人的结构最开始在设计的时候是采用“三点支撑”的方式,即:一对前脚,然后尾部(电子元件:电解电容)着地。
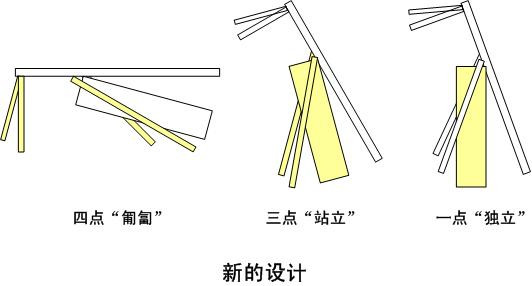
后来在实际测试的时候,发现由于尾部着地点较远,导致重心比较靠中心,从而整体平衡较稳定,在震动的时候挪动的幅度不够。后来的设计改为再增加两只后腿,既可以采用三种支撑方式: 1)“四点支撑”:四脚匍匐,较稳定,移动幅度小; 2)“三点支撑”:后脚站立,较稳定,移动幅度较大; 3)“一点支撑”:尾部独立着地,很不稳定,移动幅度最大。 在上面的视频中也演示了这三种不同的情况。
也就是加了两只后腿,看起来就像蚊子了,本机器人“蚊子”的外号也因此而得名。
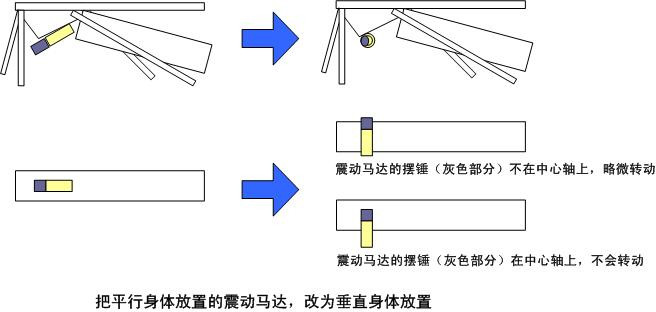
在重量一定的情况下,越是不稳定的结构,在震动的影响下移动的幅度越大。不过由于震动采用的器件是带摆锤的马达,在震动的过程中会有一个旋转的趋势,如果采用不稳定的支撑结构时,容易发生原地转动。
要改变这个情况,则可以:调整震动马达的安装方位 如果把震动马达从现在平行身体(一字型)的方向改为垂直身体(十字型)的方向安装,则旋转的趋势就会变成向前或者向后的动力,震动时机器人就会由“打转”变为“向前”或“向后”移动。 如果要改变前进或者是后退,则只要改变马达的电源正负极,即改变马达是顺时针还是逆时针旋转;如果震动马达的摆锤位置不是正好位于机器人身体的中心轴,则还会有略微的转动,但这样动起来的效果更好,还带一点转弯。
另外,这里提一下,如果改用扁平震动器,则不可避免的一定会出现以上所说的打转的状况,因为扁平震动器其实相当于上面那种震动马达以转轴垂直地面的竖着放的情况,而扁平震动器由于形状所限又不能随意调整安装方位(只能扁平的水平贴在物件的表面),即无法像上面所说情况那样通过改变方位去化解转动的趋势。当然,如果专门追求转动的效果那又是另外的一种思路。
3、电路原理
本项目的电路比起上一个项目的简单电学电路来说复杂了一些,除了特殊的太阳能电池、震动马达之外,还有几个包括电阻、电容、二极管、三级管等在内的电子元件。
对于熟悉电子电路的朋友,看了这个电路图一定觉得很简单。如果没有接触过电子电路的朋友也没有关系,接下来我会仔细进行讲解,有兴趣的朋友可以听我慢慢说来,如果是已经了解的朋友请直接跳过下面的一段。当然,可能也有一些朋友说“电路原理我就不深究了,反正我会照着电路图组装就行”——这当然也是可以的(以前我自己在初学无线电的时候就是这样的^_^)。
下面我将用简单通俗的比喻进行讲解,有一些比喻未必非常恰当,但有助于理解一些抽象和生涩的内容。1)电路符号
我们先要会看电路图,下图把各个符号所对应的电子元件都做了注明。
此外,除了了解每种符号对应的代表什么电子元件之外,我们也要懂得基本电路连接的表达方式。特别是对于交叉线的表示方式: a)下图左边的一组交叉线,中间有一个圆点,代表横、竖两条线路是互相连接的; b)下图右边的两组交叉线,一组中间是没有圆点,另一组有一个圆弧(似乎像跨过去一样),两组都是代表一样的意思——即横、竖条线路是互相不连接的。 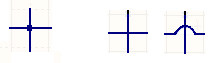
2)电子元件
我们再来了解本项目电路中所涉及到的几种电子元件。
(1)电阻 电阻的作用可以理解为减小电流。 下图两个符号都是电阻的电子符号。
如果把电流比喻成水流的话,电阻可以看成一个“把大水管的水流转到小水管中流动的装置(水流减小器)”,比较大的水流经过该设备后变成了比较小的水流。 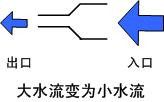 注:实际上不能简单通过大水管接小水管的方式就能把水流变小,那样只会让水流更急更快,以上的比喻只是希望通过忽略其他因素简化表述。 电阻的基本参数称为“阻值”,可以理解为能够把大水流变成多细的水流的程度,即:阻值越大,能够转换的水流就越细。 电阻“阻值”的数值单位: a)基本单位为:欧姆(符号:Ω); b)大一点的单位为:千欧姆(符号:KΩ,简称K); c)更大一点的单位为:兆欧姆(符号:MΩ,简称M)。 其换算关系为:1MΩ=1,000KΩ=1,000,000Ω
注:实际上不能简单通过大水管接小水管的方式就能把水流变小,那样只会让水流更急更快,以上的比喻只是希望通过忽略其他因素简化表述。 电阻的基本参数称为“阻值”,可以理解为能够把大水流变成多细的水流的程度,即:阻值越大,能够转换的水流就越细。 电阻“阻值”的数值单位: a)基本单位为:欧姆(符号:Ω); b)大一点的单位为:千欧姆(符号:KΩ,简称K); c)更大一点的单位为:兆欧姆(符号:MΩ,简称M)。 其换算关系为:1MΩ=1,000KΩ=1,000,000Ω
本项目中采用的电阻的阻值为:2.2K。
(2)电容 电容的作用可以理解为存储电流(实为电荷)。 电容有两个引脚,一般分为两种,一种是不分极性的普通电容;另一种是两个引脚区分正负极性的称为电解电容(简称:电解),其正极性的引脚一定要接在电源的正极,负极性的引脚一定要接在电源的负极上。
下面电子符号中,左边一个的为普通的电容,右边的两个都是电解电容(两种不同的表示方式,带加号或者空心的一边为正极)。
如果把电流比喻成水流的话,电容可以看成一个“蓄水装置”,而电解电容则是一个“限定了水流方向的蓄水池”,蓄水池中有一个特殊的倒梯形容器,往蓄水池中注水,当水达到一定程度后,由于重力平衡的问题,倒梯形容器会一次性把水全部倒出,水则从另一个出口溢出来。 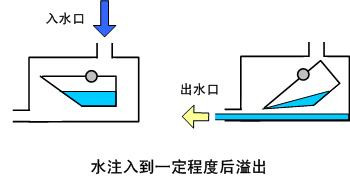
电容的基本参数称为“容值”,可以理解为能够存储多少的水,即:容值越大,能够存储越多的水(或者说需要注入越多的水才能注满,水才能从另外的出口流出)。 电容“容值”的数值单位: a)基本单位为:法拉(符号:F,较少用); b)小一点的单位为:毫法(符号:mF,较少用); c)再小一点的单位为:微法(符号:μF,常用); d)更小一点的单位为:皮法 (符号:pF,常用); e)最小的单位为:纳法(符号:nF,较少用)。 其换算关系为: 1F=1,000mF=1,000,000μF=1,000,000,000pF=1,000,000,000,000nF 1μF=1,000pF 本项目中采用的电解电容的容值为:4700μF。(3)二极管 二极管有两个引脚(因此得名),基本作用可以理解为仅允许某一个极性的电流通过。而在本项目中采用的LED发光二极管,除此功能之外还可以发光。 二极管的两个引脚是区分正负极性的,只有正极性的电流才能从二极管的正极引脚单向通过,或者说只有负极性的电流才能从二极管的负极引脚单向通过。
二极管的电子符号,喇叭口的一端为为正极。下图中左边一个的为普通的二极管,右边的两个都是发光二极管(两种不同的表示方法,都带表示发光效果的箭头)。 
如果把电流比喻成水流的话,二极管可以看成一个“限定了水流方向的可以根据水压自动控制的阀门”,当水流的压力达到一定程度后,水流会顶开阀门允许水流通过,但是同时水流不会往入水口倒灌(入水口位置高于出水口,实现单向流动;用专业的比喻就是一种称为“逆止阀”能够控制水不会倒流的阀门)。 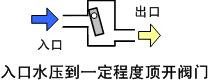 本项目中二极管的作用就是一个阀门的功能,阀门要打开需要一定的条件,这可以理解为水量够多达到一定的水压时,阀门打开允许水流通过。 二极管“打开阀门”,实际上就是所谓的“导通”,即二极管两端的电压达到一个下限值时二极管就导通允许电流通过。一般普通的硅材料的二极管的导通电压为0.7V(伏特),而本项目我们采用的LED发光二极管的导通电压为2V(伏特)左右,也就是说当达到2V(伏特)左右时LED发光二极管导通,同时发出亮光。 本项目之所以采用LED发光二极管,是因为我们希望设置一个导通条件为2V左右的阀门。如果要采用一般的硅材料的非发光二极管,因为其导通电压条件比较低,要整体导通条件达到2V的话,我们就需要把三个普通的二极管串联在一起(每个导通电压0.7,三个就是2.1V)。即三个普通的硅二极管串联可以代替一个LED发光二极管,当然为了简单且减少元件的数量,我们建议还是采用LED发光二级管。 这里要提醒一下,本项目建议采用红色发红光的LED发光二极管,这种二极管相对来说导通电压比较低,而其他颜色的导通电压比较高(接近甚至达到3V,绿色发绿光、黄色发黄光的相对都比较高,而白色发其他颜色光的最高),否则可能会影响效果——即影响阀门的灵敏度,可能导致阀门很难被打开。
本项目中二极管的作用就是一个阀门的功能,阀门要打开需要一定的条件,这可以理解为水量够多达到一定的水压时,阀门打开允许水流通过。 二极管“打开阀门”,实际上就是所谓的“导通”,即二极管两端的电压达到一个下限值时二极管就导通允许电流通过。一般普通的硅材料的二极管的导通电压为0.7V(伏特),而本项目我们采用的LED发光二极管的导通电压为2V(伏特)左右,也就是说当达到2V(伏特)左右时LED发光二极管导通,同时发出亮光。 本项目之所以采用LED发光二极管,是因为我们希望设置一个导通条件为2V左右的阀门。如果要采用一般的硅材料的非发光二极管,因为其导通电压条件比较低,要整体导通条件达到2V的话,我们就需要把三个普通的二极管串联在一起(每个导通电压0.7,三个就是2.1V)。即三个普通的硅二极管串联可以代替一个LED发光二极管,当然为了简单且减少元件的数量,我们建议还是采用LED发光二级管。 这里要提醒一下,本项目建议采用红色发红光的LED发光二极管,这种二极管相对来说导通电压比较低,而其他颜色的导通电压比较高(接近甚至达到3V,绿色发绿光、黄色发黄光的相对都比较高,而白色发其他颜色光的最高),否则可能会影响效果——即影响阀门的灵敏度,可能导致阀门很难被打开。
(4)三极管 三极管有三个引脚(因此得名),在本项目中的基本作用可以理解当“控制引脚”的电压达到一定程度后把另外两个引脚连通从而允许电流通过。 三极管的两个引脚是不同的,其中“控制引脚”称为“基极”,用字母“B”表示;另外常连接着电源的,相当于引入电流的那一引脚称为“发射极”,用字母“E”表示;还有一个引脚是作为输出电流给目标的,称为“集电极”,用字母“C”表示。 三极管通常分为NPN和PNP两种类型(这里不做详细介绍,如果不明白的可以百度一下),简单的理解就是: a)NPN型的三极管,其“发射极”固定连接的是电源的负极,即实现的功能就是控制负极的电流从“集电极”输出; b)PNP型的三极管,其“发射极”固定连接的是电源的正极,即实现的功能就是控制正极的电流从“集电极”输出。 注:实际上电流没有正负极之分,电流都是从电源正极流向电源负极,上面这样提只是便于简化表述。
下图三极管的电子符号,左边的两个为NPN类型(有两种表示方法),右边的两个为PNP类型(有两种表示方法)。 NPN和PNP两者的符号区别只是发射极箭头的方向,NPN是箭头向外的,而PNP是箭头向内的,这个箭头其实就是电流的方向(电流实际上从电源正极流向负极的),正好也就是NPN型的发射极是接着电源负极,而PNP型的发射极是接着电源的正极的。 
如果把电流比喻成水流的话,三极管可以看成一个“由注入的水的水压控制的水闸”,当从控制口注入的水的水压达到一定程度后,水闸会打开,水闸上游的水会流向下游。如果NPN型三极管说是“控制水是从东流向西的水闸”,则PNP型三极管就相当于“控制水从西流向东的水闸”。(姑且可以这样理解) 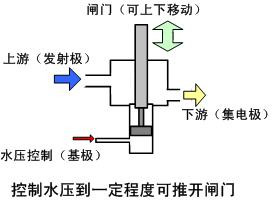
三极管有比较多的参数指标,这里不展开讲,有兴趣的可以自己百度一下。这里只提一个参数——“最大电流”,也就是说三极管最能够承受多大的电流通过,用我们水流的例子理解就是这个水闸单位时间里最大能够允许多大的水流通过(立方/秒)。我们这个电路由于采用的是太阳能电池供电,实际电路的电流并不大,所以我们选择三极管的时候就按照比设计电流稍微大一点的指标进行选型。
本项目采用两个三极管,一个是NPN的,型号为9014;一个是PNP的,型号为9015。 如果看过这个电路图原始版本的朋友可能会知道,他原来采用的两个三极管的型号为2N3904和2N3906,那两种三极管的最大电流是0.2A。其实这个影响不大,之所以我这里改为9014和9015是因为在我们国内,后面这两种型号的三极管相对容易找一些,而这两种型号的三极管最大电流虽然只是0.1A,但是对于我们这个电路来说还是足够了的。(5)震动马达 本项目的动力来自震动马达产生的震动波。关于震振动马达在前面的驱动原理的章节中已经有了详细的介绍,这不再重复。 马达的电子符号如下图(两种表示方法),圆圈里面的字母“M”其实就是英文单词“Motor”(译为:发动机、马达)的首字母。
还是对于水流的例子,本项目的震动马达相当于一个“以水流驱动的水轮机(水车)”,水流从高处留下来,冲击扇叶,扇叶带动一根转轴转动,结果就是把水流落差的势能转为机械旋转的动能。 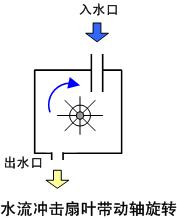
(6)太阳能电池 太阳能电池是本项目机器人的能量来源。
电池的电子符号如下图:
a)第一个和第二个为普通电池的符号。 □ 一根长线和一根短线为一组,长线的一段为正极,短线的一段为负极; □ 很多时候,一组长短线就代表一节电池,两组就代表两节电池; □ 也有些时候,多少组长短线并不代表具体多少节电池,尤其是在电压比较高时(如果真要换成多少节电池来表示可能需要非常多组的长短线,那样的话太复杂),而只是代表是电源,具体多少电压一般会在旁边直接注明,比如:3V、1.5V*2(意为两节1.5V的电池)。
b)第三个符号是电池旁边带了英文“Solar Cell”, 含义就是“太阳能电池” 。
c)第四个符号是电池旁边带了一组射入的箭头,代表光线,其实也指的是“太阳能电池” 。
太阳能电池是一种把光能转换为电能的器件。单片太阳能电池板的功率都不大,电压电流都不高,如果用多块太阳能电池板串联来可以提高电压,如果用多块太阳能电池板并联来可以提高电流,也可以是即串联又并联既提高电压也提高电流。即便如此,由于太阳能电池的效率并不高,所以一般不会直接用太阳能电池作为动力驱动,动力驱动用专门的大电流电池组,而太阳能电池只是用于给这些电池组进行充电(充电电流要求不高)。
本项目的机器人的移动方式决定了其不需要持续的电源供电,所以我们用可以用太阳能电池进行直接的动力驱动,中间通过一个巧妙的电能积蓄电路进行电能收集,达到一定的量之后进行瞬间短暂的放电以获取足够的电流。具体原理在后面的电路分析中会有详细的说明。
同样对于水流的例子,我们把太阳能电池看成是“可以收集雨水的装置(雨水收集器)”,即把晒太阳看成是淋雨(正好相反,哈哈),把“收集太阳能转为电能形成电流”看成是“收集雨水形成水流”。 
本项目采用两片1.5V/50mA的太阳能电池板串联在一起使用。
3)原理分析
接下来我们对本项目的电路进行原理分析,有兴趣深入了解的朋友可以继续跟着来,如果已经很熟悉的可以跳过本节。
本项目机器人的电路实际上是一个比较巧妙的电路——脉动充放电控制电路,其可以把功率较低且有可能断断续续的太阳能电能收集起来集中存储,当存储的电能达到一定量的时候,通过瞬间短暂的放电以获取足够的电流去驱动马达。虽然瞬间放电的电流足够大能够驱动马达,但是持续时间很短,在积蓄的电能很快耗尽后,则马达停止电路重新开始收集太阳能进入下一次循环。
即是这样一个过程:
太阳能充电——>积累电能——>瞬间放电——>驱动马达——>耗尽电能——>太阳能充电……
由以上看出,本项目的机器人运动的频率是有一个间断性的,即周期性一阵阵的挪动,阳光亮度越大,每个周期中间的间隔时间就越小,相当于挪动得更快。
(1)常规分析
下面我们将以常规的方式,即从电子专业的角度,对电路图的原理进行分析。
特别说明:以下的箭头并不一定代表电流方向,只是为了说明电路执行的流程,实际电流方向总是从正极流向负极。
a)太阳能电池把太阳能转换为电能,并给电解电容充电。
b)电解电容积蓄电能,过程中整体电路的电压逐步上升,当达到LED二极管的导通电压时(2V),LED二极管导通。
c)LED二极管导通后,可以给PNP三极管的基级提供足够的电压,促使PNP三极管导通。
d)PNP三极管导通后,反过来又给NPN三极管的基极提供足够电压,促使NPN三极管导通。
e)NPN三极管导通,一方面通过电阻给PNP三极管基极保持足够的导通电压,另一方面驱动马达转动。其中用电阻可以降低电流,以保护LED二极管以及PNP三极管不容易烧坏,而且也降低LED二极管的功耗(毕竟这里LED二极管的主要作用不是用来发光的),让更多的电能都用在驱动马达上。
f)马达启动后,会迅速消耗电解电容中存储的电能,整体电路的电压下降,直到无足够电压保持二极管的导通,则二极管截止。
g)由于NPN导通后会通过电阻分一定的电流给到PNP三极管的基极,使得即使二极管截止之后仍然有足够的电压在PNP三极管基极使其保持导通。
(2)类比分析
如果是原来没有电子基础的朋友,可能对前面常规方式的电路原理分析还是听得一头雾水,没有关系,下面我们将以通俗易懂的类比方式再进行一次分析。已经了解的朋友可以忽略跳过继续浏览后面的内容。
在之前介绍电子元件是都会类比到某一种容易明白的工具设备,其实那不仅仅是有助于了解电子元件,同时也是为下面用类比方式介绍电路原理做一个铺垫。
主要的流程如下:
1)下雨天气,“雨水收集器”收集雨水
2)收集到的雨水注入“蓄水池”
3)“蓄水池”蓄满水后会溢出,一次性倒出
4)水流顺着管道流向“阀门”和“水闸”
5)“阀门”和“水闸”关闭,水流无法继续向前流
6)水压升高,水流顶开“阀门”并通过“阀门”,水流到达“闸门1”的基极
7)水压升高,“闸门1”被顶开,水流从“闸门1”的发射极流向集电极
8)“闸门1”集电极流出的水流向“闸门2”的基极
9)水压升高,“闸门2”被顶开,水流从“闸门2”的发射极流向集电极
10)“闸门2”集电极流出的水流向“水车”,并且通过“水流减小器”流回“水闸1”的基极
11)“水车”在水流的冲击下转动,并消耗水流;水流经过“水流减小器”流回“水闸1”的基极
12)“水闸2”集电极流出的水经过“水流减小器”回流到“水闸1”的基极,确保“水闸1”继续打开,循环之下“水闸2”也能保持打开
13)“水车”转动继续消耗水流
14)当“水车”转动消耗大多数水流,“水闸1”和“水闸2”无法维持打开状态,全都关闭了
15)“水车”失去水流驱动,停止了转动
16)准备重新收集雨水,开始下一轮循环
以下为原理分析的模拟动画,希望能够有助于理解。
题外话
如果了解过本项目电路的朋友,可能会知道该电路原型建议采用的是闪光LED二极管(也称爆闪LED二极管),即点亮后会自动以一定频率自动闪光的发光二极管(其之所以会闪光,其实是嵌入了一块用于控制闪光的芯片)。之所以使用这种类型的二极管,实际上就是因为只要LED二极管瞬间导通一次就可以令整个电路触发正常运行(之后发光二极管不需要继续导通),而且因为只是瞬间发光,所以LED二极管消耗的电能比较小,让剩余的所有电能都能够用在电路的电机运行上。 本项目这里不使用这种闪光LED二极管,而是采用普通发光的LED二极管,主要是因为:
1)虽然说闪光LED比一般LED省电,但是一般闪光LED的导通电压比较,通常都高于3V,如果要采用这种闪光LED二极管,则我们整体电路的太阳能电池板就不能使用3V的,而是需要更换为3V以上甚至4V的,再加上本身闪光LED二极管也比普通LED二极管价格高,这样的话无形中增加了成本。 2)虽然理论上使用普通LED二极管的效率不如使用闪光LED二极管,但是经过我们实践,以我们目前项目的电路元件的参数,我们的机器人还是可以运行得比较顺畅的,一来是我们所采用的电机都是低能耗的,能够在比较低的电流下正常运行;二来我们采用的太阳能电池板的电流也比较高,能够提供较大的电流。所以即便是我们采用普通LED二极管多消耗了一些电能,但是还是不影响机器人的整体运行的。
二、准备工作
本项目需要的器材主要包括:PVC线槽、震动马达、太阳能电池、电阻、电解电容、二极管、三极管、拨动开关、螺丝/螺帽等。

以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。
主要的器材都可以从网上购买,我列出了一些淘宝上的网址,基本上我也是通过这个渠道进行采购的,供大家参考。
名称
规格
数量
采购预算/成本折算
来源
用途
PVC线槽
2.5CM宽度1段
4元 / 0.5元
实体五金店
主要结构材料震动马达
手机用震动马达1个
1元
淘宝:旱码头…
动力太阳能电池
1.5V2片
2.2元
淘宝:zhiqiang588
电源电阻
2.2K1个
8元 / 0.03元
淘宝:jxpjihao
电子元件电解电容
4700uf1个
0.4元
淘宝:东莞创博…
电子元件二极管
LED红色发光二极管1个
0.08元
淘宝:lc工作室
电子元件三极管
9014、9015各1个2个
4.5元 / 0.15元
淘宝:jxpjihao
电子元件
电路板
电路板/实验板/万用板/洞洞板1块
1.5元
淘宝:lm750811
拨动开关
小拨动开关1个
0.36元
淘宝:jianfei180
电源开关(可以省略)M2垫片
孔径2mm3个
3元 / 0.09元
淘宝:精隆五金…
M1.2*5螺丝
直径1.2mm,长5mm
4颗
4元 / 0.16元
淘宝:精隆五金…
固定PVC材料M2*10螺丝
直径2mm,长10mm,平头1颗
2元 / 0.02元
淘宝:精隆五金…
固定PVC材料M1.2螺母
孔径1.2mm4个
15元 / 0.6元
淘宝:微型螺丝…
固定PVC材料M2螺母
孔径2mm1颗
2元 / 0.02元
淘宝:精隆五金…
固定PVC材料合计
48.04元 / 7.11元
同时为了方便各位朋友,我也开通了PVCRobot系列机器人淘宝网店,希望能更好的为大家服务。 本项目套件的淘宝地址:http://item.taobao.com/item.htm?id=9284864243
三、制作过程
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
3.1、电路焊接
控制电路是本机器人的核心,这里将会比较详细的介绍如何进行电路焊接。电路焊接可以算是一门技术活,对于熟练的朋友来说这是小菜一碟,而且肯定很多人比我焊接得好得多,这里我算是班门弄斧了,目的也是给入门的朋友一点指引吧。 这里我们选用一块树脂实验板(也称万用板/洞洞板)作为焊接电路的载体,也许有人会说“那么简单的电路也要电路板”——确实是对于一些熟练的朋友来说,这样简单的电路还不如用电子元件的引脚直接搭起来焊接。这里之所以还选择用电路板,一来作为入门教程来说为了找一个简单实例,为以后焊接更复杂的电路打基础;二来我本人的习惯还是坚持用电路板——不容易出错。
使用电路板焊接电路,尤其是万用板/实验板,可能大家会说,这个板上的孔全是一样的,该如何排列元件呢? 这里有一个技巧——通常情况下,在电路板上排列元件,一般最好是按照各元件在电路图中所在的位置对应到电路板上布局,什么意思呢?即,比如元件A在电路图中位于最左边,则实际在电路板上也排在最左边;如果元件B在电路图中正好位于元件A的右边,则在电路板上也把元件B布局在元件A的右边。这样一来容易对照电路图进行焊接,不容易出错;二来多数电路图排列是正好符合其电流或者信号的流向,按照电路图的布局排列实际的元件不容易产生干扰或者(信号)异常。 当然,这里所说的一般只是针对手工焊接的电路板,如果是设计印刷电路板(PCB)来焊接电路,那涉及到更多的内容,这里不展开讨论。
对于本项目的电路图(如上),下面我们对应各元件在图上所在的位置进行实际电路板的布局(外接的电源、马达、电解电容除外,以方便焊接考虑)。
这是“电路板正面布局图”(无焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
这是“电路板底面布局图”(有焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
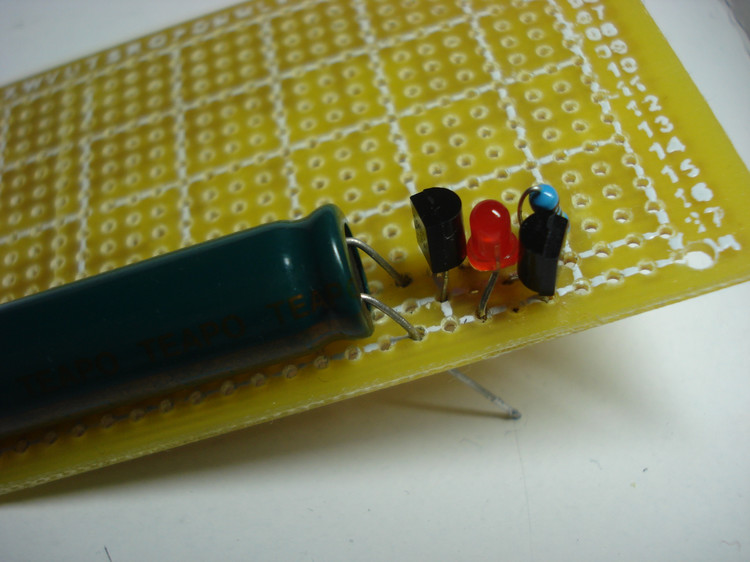
1)三极管
我们先来焊接三极管。
根据“电路板正面布局图”在电路板上插入两个三极管(引脚不要留得过短,不要让元件太过贴着电路板)。
到这里可能大家会问:“三极管有三只引脚,应该怎样判别各引脚呢?”这里我给大家介绍一些方法。
三极管的符号:
判断三极管的引脚,最简单的方法就是通过三极管的外形直观判断出其引脚。 本项目采用的三级管是9014、9015两个型号,一般这两个型号的外形封装是TO92(一种封装类型,特征就是如下图的外形),且引脚的排列也是相对固定的。

以上的图示只是TO92封装类型的三极管默认的引脚排列,从本博客的淘宝网店购买的套件也是按照这个布局排列。
如果本项目的三极管大家是自己获取的而不是直接从本博客的淘宝网店购买的套件,或者是说在本项目之外采用其他的三极管,则可能由于三极管的外形(封装)不同,或者由于厂家众多执行的标准也不一样,所以单纯从外形判断三极管的引脚并不是百分之百准确的,这个时候我们就需要通过其他更准确的方法去测量。
附:如何准确的判别三极管的引脚?
要准确判断三极管引脚的方法有很多(可在百度上搜索),这里仅提一个我常用的比较简单的方法——直接用万用表的三级管测量功能(三极管直流放大系数hFE测量)。
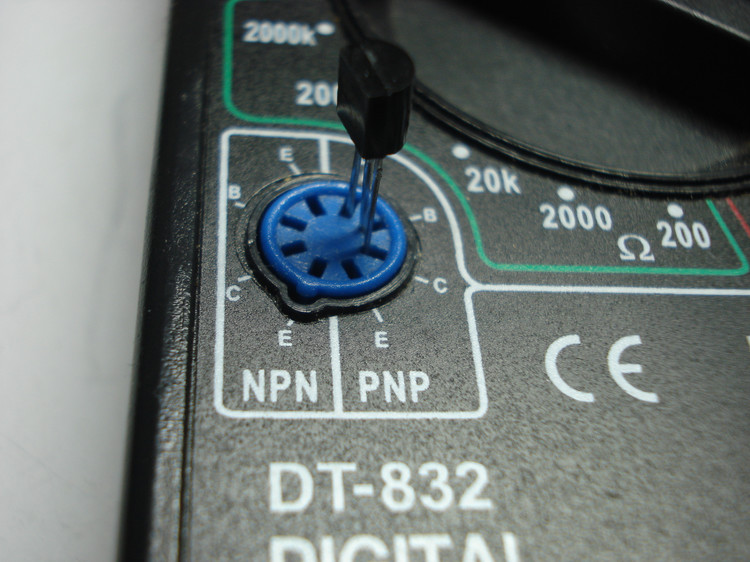
我这里以数字万用表为例进行介绍。(关于该款数字万用表,具体见之前的工具准备)
把数字万用表的档位调到“hFE”,即测量三极管的直流放大系数。
如果测量的是NPN三极管,则把三极管插到NPN三极管的插座上。通常三极管的中间引脚是基极(B),可以尝试各种插接方式,直到显示屏显示出一定的数值为止(通常是几十到几百),这个时候三极管各引脚的电极就对应插孔所标注的电极。


如果测量的是PNP三极管,则把三极管插到PNP三极管的插座上。通常三极管的中间引脚是基极(B),可以尝试各种插接方式,直到显示屏显示出一定的数值为止(通常是几十到几百),这个时候三极管各引脚的电极就对应插孔所标注的电极。

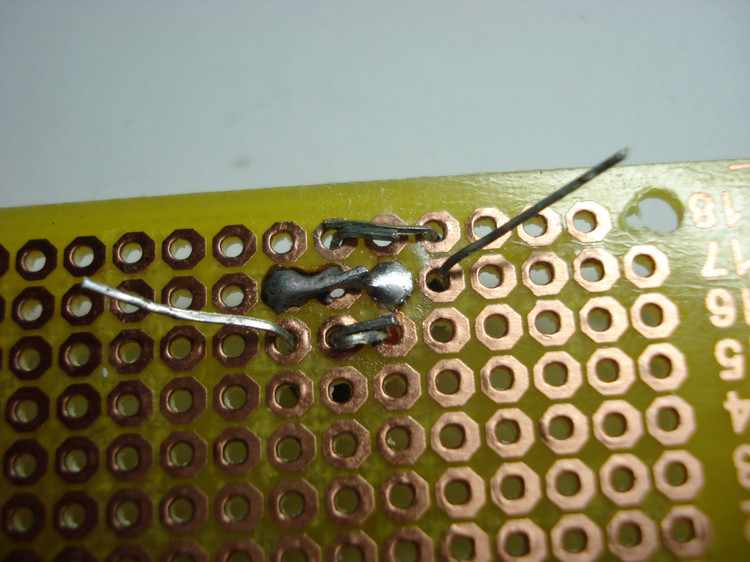
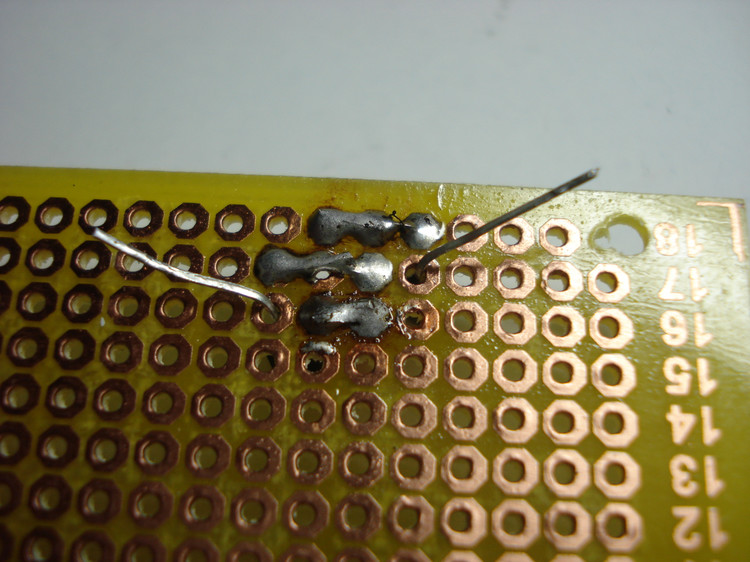
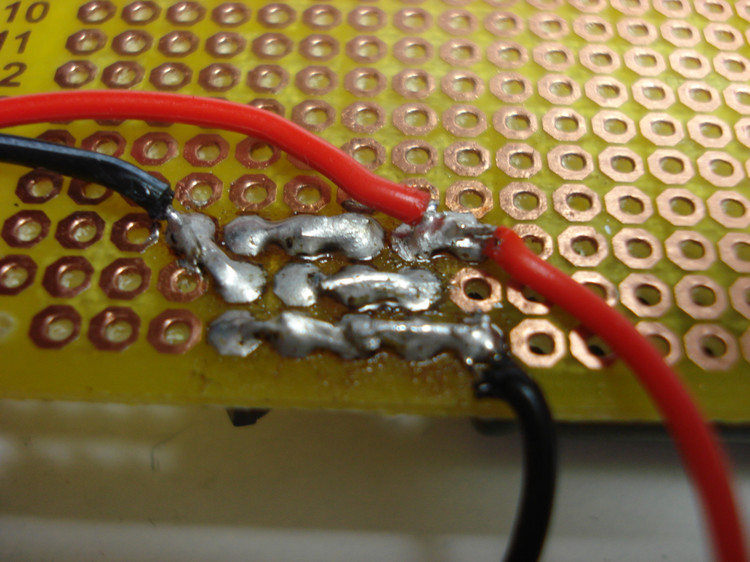
我们把三极管按照正确的引脚插好,然后就按照“电路板底面布局图”焊接三极管(紫色部分为连接线)。
焊点之间的连接线,一般我们可以直接用元件的引脚折起来再焊上。
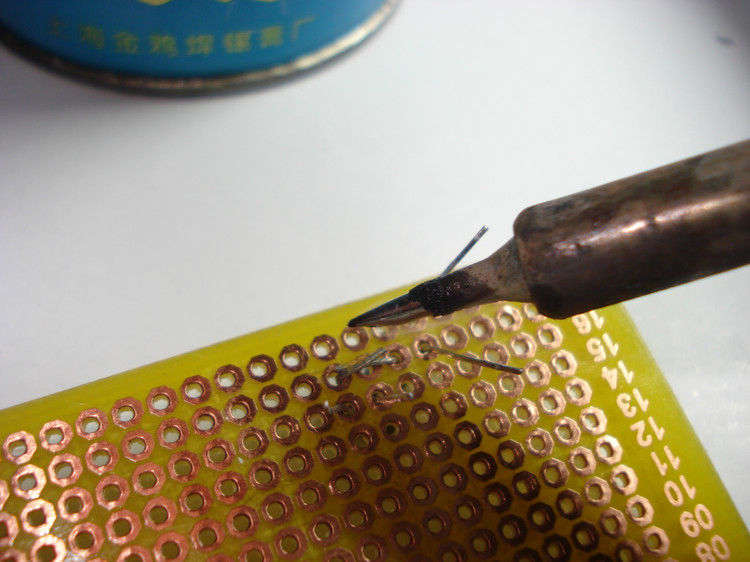
 为了焊接时使焊锡更容易粘住引脚和电路板的铜箔,一般需要给焊接的部位(引脚和铜箔)涂上一点助焊剂后再用烙铁焊接。 常用的助焊剂主要有松香(用松树树脂提取的物质),也有专门焊锡膏(前一篇关于器材准备的文章中有说明)。值得注意的是,比起松香,焊锡膏的助焊效果更好,但是焊锡膏一般都有一定的腐蚀性,对电路板的线路有伤害(时间长会腐蚀电路),所以用量不宜过多,而且建议焊接好后最好用布或纸擦拭干净。 把元件的引脚按照要连接位置折好并用剪刀剪掉多余的长度,然后用牙签棒蘸一点焊锡膏涂在要上焊锡的引脚和电路板铜箔上。
为了焊接时使焊锡更容易粘住引脚和电路板的铜箔,一般需要给焊接的部位(引脚和铜箔)涂上一点助焊剂后再用烙铁焊接。 常用的助焊剂主要有松香(用松树树脂提取的物质),也有专门焊锡膏(前一篇关于器材准备的文章中有说明)。值得注意的是,比起松香,焊锡膏的助焊效果更好,但是焊锡膏一般都有一定的腐蚀性,对电路板的线路有伤害(时间长会腐蚀电路),所以用量不宜过多,而且建议焊接好后最好用布或纸擦拭干净。 把元件的引脚按照要连接位置折好并用剪刀剪掉多余的长度,然后用牙签棒蘸一点焊锡膏涂在要上焊锡的引脚和电路板铜箔上。

用烙铁粘上焊锡对着要引脚和铜箔的结合部位进行焊接。

2)LED二极管
接下来我们要焊接LED二极管。
根据“电路板正面布局图”在电路板上插入LED二极管(引脚不要留得过短,不要让元件太过贴着电路板)。

这里我们又碰到一个问题,“LED二极管的两只引脚是区分极性的,应该如何判别呢?”这里我再介绍一个小技巧。
附:如何判别LED二极管的引脚?
方法1:如果是全新的LED二极管,一般其两个引脚的长度是有区别的,通常长的那个引脚为正极,即电子符号的喇叭口一端;
方法2:LED二极管外壳是透明的,可以透过管壳直接看到里面的电极,连接内部三角形大电极的引脚是负极,另一个连接内部小电极的引脚是正极。
我们把二极管按照正确的引脚插好,然后就按照“电路板底面布局图”焊接二极管(紫色部分为连接线)。
3)电阻
然后我们焊接电阻。
根据“电路板正面布局图”在电路板上插入电阻(引脚不要留得过短,不要让元件太过贴着电路板)。
如果看得懂电阻的色环所表示的含义,细心的朋友可能会发现,上图照片中的电阻并不是2.2K的,而是2.4K的。其实这个相差不大,只是因为我一下子找不到2.2K的电阻,就用2.4K来代替了。(关于如何通过色环判别电阻的阻值,有兴趣的朋友可以自己百度一下)。
我们把电阻按照正确的引脚插好,然后就按照“电路板底面布局图”焊接电阻(紫色部分为连接线)。
4)电解电容
最后我们焊接电解电容。
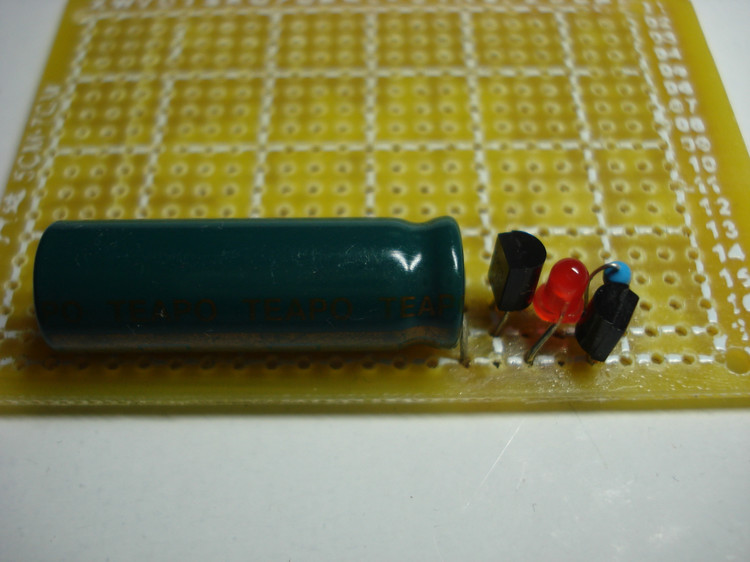
根据“电路板正面布局图”在电路板上插入电解电容(引脚不要留得过短,不要让元件太过贴着电路板)。
电解电容的引脚是区分正负极性的,通常其外皮上会印刷有“”减号,对应代表负极性的那只引脚。
我们把电解电容按照正确的引脚插好,然后就按照“电路板底面布局图”焊接电解电容(紫色部分为连接线)。

最后,就完成了所有电子元件的电路板焊接。
3.2、电路测试
焊接好电路板之后,我们需要对电路进行测试,看看电路是否能够正常运行。
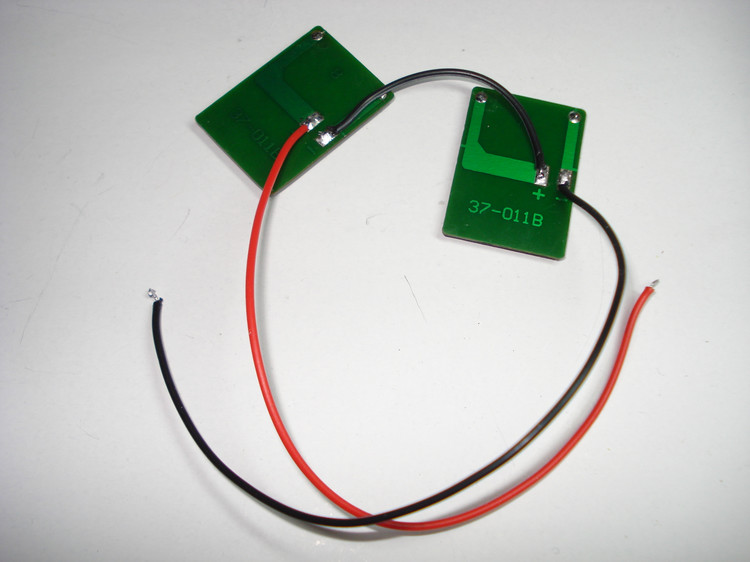
我们先把两片太阳能电池用电线串联起来,如下图:左边电池的正极接右边电池的负极(短黑线),则左边电池的正极就作为串联后的正极输出(长红线),右边电池的负极就作为串联后的负极输出(长黑线)。
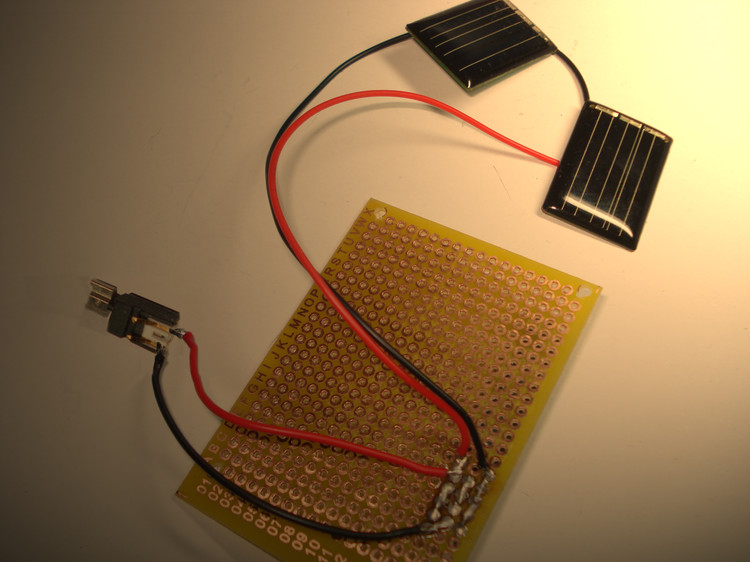
按照“电路板底面布局图”接好马达和太阳能电池。
特别注意,本项目的太阳能机器人一般只能在太阳下才能运行,而在普通灯光下由于亮度不足将无法正常运行。如果要在室内测试太阳能机器人,由于光线不足就需要借助特别的灯光——可以选择100瓦的白炽灯(在实体五金店中可以很容易买到灯泡和插座),以代替阳光。(注意:不能用一般日光灯或是节能灯,因为其亮度无法让太阳能电池有足够的输出功率)。
 在白炽灯下,进行电路测试。 正常效果,马达会每隔几秒钟转动几下。调整白炽灯与太阳能电池板的距离,查看马达在光线不同时的效果——光线越亮,马达每两次转动的间隔就会越短,如果灯泡贴着太阳能电池板甚至马达会持续转动。
在白炽灯下,进行电路测试。 正常效果,马达会每隔几秒钟转动几下。调整白炽灯与太阳能电池板的距离,查看马达在光线不同时的效果——光线越亮,马达每两次转动的间隔就会越短,如果灯泡贴着太阳能电池板甚至马达会持续转动。
确认电路都调试好没有问题了,我们就可以把电路板按照实际用到的范围从整块电路板上进行裁切。当然如果是比较熟练的朋友,可以在焊接前就按照所需的尺寸先裁切好电路板。
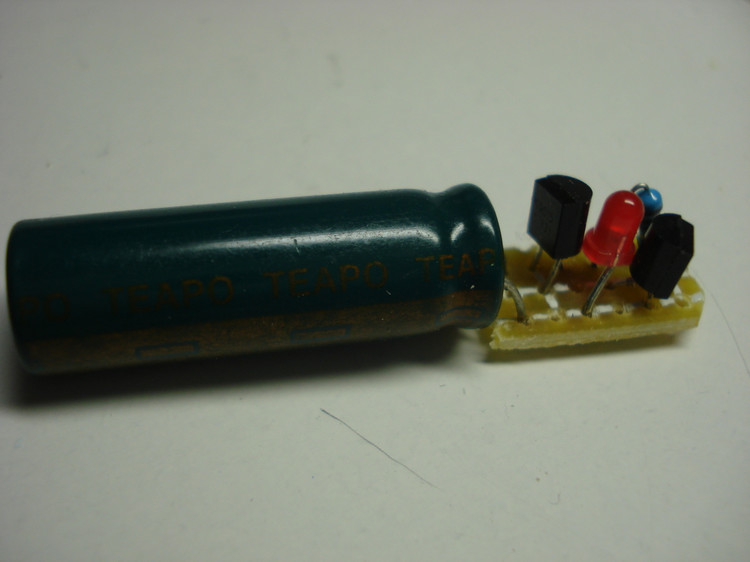
以下是机器人电路板最终的样子。请注意电解电容不需要完全搭在板上,只是引脚部分连电路板上,即:靠近电解电容这一端的电路板不要预留过多,这样电解电容可以上下活动调整,因为电解电容是作为机器人腹部,有一端是贴住地面的,可以调整其角度以改变机器人地面支撑的角度。
3.3、结构制作
 然后再剪成如下形状,其中一端用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。
然后再剪成如下形状,其中一端用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。
方块中间用小电钻(也可用锥子)打两个小孔(直径1mm左右,上螺丝用)。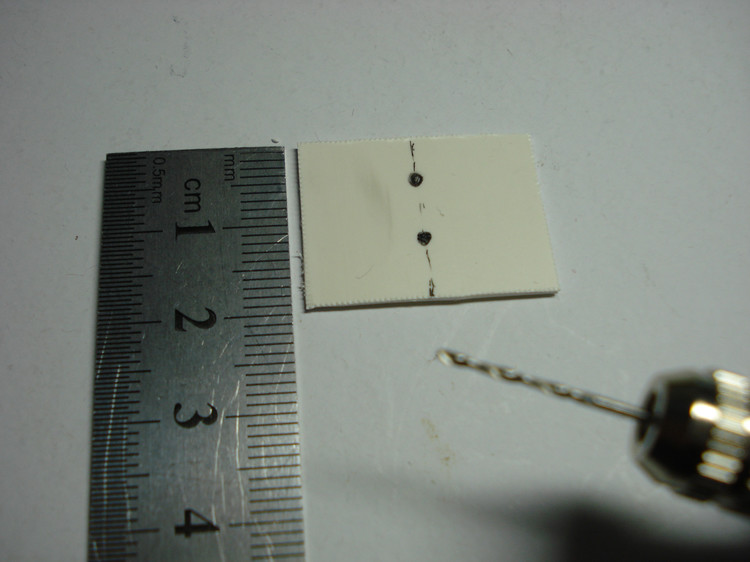
3)前脚
剪一段PVC窄方条(6.5cm*0.5cm),在两边离前端大概1cm处开始剪成斜边,并在2.5cm和4cm处留好折痕。
 把窄方条用尖嘴钳折成如下样式。
把窄方条用尖嘴钳折成如下样式。

4)腹板
用PVC剪一个方条并折成如下形状,作为腹板,并对照主干前段的两个小孔在腹板弯折处也打两个小孔。 尝试把电路板固定在上面,看看位置和尺寸是否合适。注意:腹板靠近电解电容这一端,与电路板对齐,允许电解电容上下调整位置。
5)待组装的部件
把主干、前脚、背板、腹板都对准位置,打好固定的小孔,其中: (1)主干前端、腹板弯折处、前脚,三处的一对小孔都是对应在一起的; (2)主干中部、背板,两处的一对小孔都是对应在一起的。
背板的两个小孔上1.2*5mm的螺丝,并且加上垫片。

3.4、安装电路板

2)背板
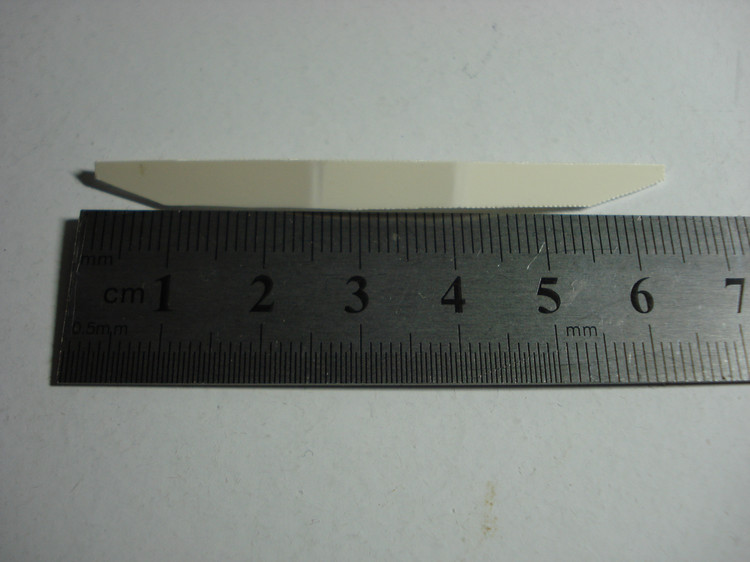
剪一块PVC方块(2.5cm*2cm)。
下面我们开始机器人机械结构的制作,按照机器人的不同部位进行组装。
1)主干
用剪刀裁一段PVC方条(6.5cm*1.5cm左右)。
